Ausgabe 23 · November 2016
Diesen Artikel als PDF
Totpunktloses gekapseltes Fahrradkurbelgetriebe mit integrierter Gangschaltung
Der steinige Weg von »Erfindern«
von Max und Anton Rainer
Seit Erfindung des Fahrrades mit Kurbelantrieb gab es viele Ideen, wie man den Totpunkt beim Treten vermeiden und die Übersetzung während der Kurbeldrehung optimieren könnte. Man muss hier zwischen zwei bzw. drei Ansätzen unterscheiden:
- Methoden, die zwar nicht die 180°-Kurbelstellung der Pedale (speziell am Totpunkt) vermeiden, aber während der Kurbeldrehung effektiv verschiedene Übersetzungen gewährleisten und die Totpunktphase möglichst kurz halten wollen. Beispiel: ovale Tretscheiben.
- Methoden, die die Totpunktstellung und die 180°-Stellung der Kurbeln am Totpunkt grundsätzlich zu vermeiden suchen. Beispiele sind oft sehr umständliche Hebelkonstruktionen an den Tretkurbeln.
- Kombinationen von 1 und 2.
Von der Idee zum Prototyp
In meiner Familie wurden elliptische Kettenblätter, Hebellösungen und anderes diskutiert. Letztendlich führten die Überlegungen zum Prinzip des Unrundgetriebes. Auf dem Weg zur konstruktiven Umsetzung wurden zuerst simple Modelle – teilweise mithilfe eines Modellbaukastens – gebaut und die mathematische Beweisführung erbracht, dass solche Unrundgetriebe perfekte Abrollungen ermöglichen.
Die entscheidenden Bauteile für die reale Ausführung sind standardmäßig nicht in der entsprechenden Qualität verfügbar, eine Sonderanfertigung war zu teuer, Anbieter für Einzelstücke gibt es kaum. Zudem war es erforderlich, dass das Unrundgetriebe gewisse Achsabstände aufwies, die auch den Abständen ineinandergreifender kreisrunder Zahnräderpaare entsprechen mussten.
Trotzdem besorgten wir die erhältlichen Standardteile und entwickelten auf deren Basis eine erste Konstruktion zusammen mit einem Schlosserbetrieb mit CNC-gesteuerten Maschinen. Die erste Garnitur dieser Bauteile brach gleich beim ersten Versuch durch eine schwergewichtige Person auf einer extremen Steigung. Die nächste Garnitur wurde gehärtet und hielt relativ lange stand. Aber immer war zu befürchten, dass diese Bauteile wieder versagen könnten.
Dieser nach einer CAD-Zeichnung hergestellte Prototyp ermöglichte Versuche auf einem Rollentrainer und auch das Fahren auf der Straße. Der Prototyp konnte noch nicht hinsichtlich Baugröße, Masse, Schmierung, Abdichtung gegen austretendes Getriebeöl usw. optimiert werden. Deshalb entstand ein zylindrisches, relativ großes Kurbelgehäuse, das in einen umgebauten Fahrradrahmen eingepasst wurde.
Der Prototyp wurde noch ohne Gangschaltung verwirklicht. Er diente zur Dokumentation mit Filmaufnahmen, Schema-Zeichnungen, Computer-Animationen etc. Bild 1 zeigt, dass das linke Pedal bereits in Vorlage ist, wenn sich das rechte Pedal am tiefsten Punkt befindet. Das gilt genauso umgekehrt, die Konstruktion ist also rechts-links-symmetrisch, nachdem unsymmetrische einfachere Varianten verworfen worden waren. Auffallend ist auch, dass das Kettenblatt viel kleiner ausfallen kann als beim herkömmlichen Fahrrad (siehe dazu weiter unten).

In der Zwischenzeit ist dieser Prototyp leider ebenfalls defekt, weil die oben genannten zentralen Zahnräder nicht in der erforderlichen Qualität (Werkstoff, Oberflächenvergütung, Härte) bezogen werden konnten. Fachleute aus dem Getriebebau attestieren aber, dass das besagte Getriebe mit einiger Entwicklungsarbeit nahezu spielfrei und dauerfest herstellbar wäre und dass die Serienherstellung von geeigneten Unrundgetrieberädern in qualitativ hochwertiger Weise möglich wäre.
Parallel liefen bei einem Patentanwalt Vorprüfungen zum möglichen Schutz der Erfindung; es sprach nichts gegen eine Patentierung. Daraufhin beantragten wir, ohne Hilfe eines Anwalts, ein Österreich-Patent. Ergänzend reichten wir Anträge für die Kombination mit einem Dreiganggetriebe im gleichen Gehäuse und auch eine Kardanvariante, die sich hier besonders anbietet, weil der Abtrieb direkt über eine zweite, ohnehin notwendige Welle erfolgen kann, ein.
Wir versuchten mehrfach, Firmen aus der Fahrradbranche für die Idee zu begeistern, z.B. auf der Eurobike. Nur zwei Firmen zeigten Interesse, sagten aber bald wegen anderer Schwerpunktsetzung wieder ab. Angeschriebene Unternehmen gaben nur abschlägige Antworten oder gar keine Rückmeldung. Interessant war die Stellungnahme eines namhaften Getriebebauers für Fahrräder, die etwa so lautete:
Das können Sie vergessen, denn speziell im Rennbereich würde kein Straßen-Rennfahrer auch nur 1 g mehr auf dem Fahrrad akzeptieren. Da sei man teils irrational, es gehe um jedes Schräubchen. Außerdem seien diese Rennfahrer so extrem auf das bekannte Bewegungsmuster fixiert, dass es sofort zu Ablehnungen kommen würde, wenn die 180°-Stellung der Tretkurbeln zueinander verlassen würde. Niemand würde sich auch nur probeweise auf einen längeren Versuch einlassen. Selbst wenn Ihr Modell Vorteile böte, es käme nicht so weit, dass es überhaupt geprüft würde. Zudem müsse man berücksichtigen, dass Spitzen-Rennfahrer den Verstand bewusst ausschalten würden, denn nur so seien die Torturen überhaupt verkraftbar. (Der O-Ton war hier noch viel deutlicher).
Trotz solcher Dämpfer bemühten wir uns, Meinungen in der Fahrradbranche einzuholen. Vorführungen des Prototyps lösten großes Staunen und Interesse aus. Das gab uns wiederum Auftrieb. Keiner von uns ist »vom Fach«, sondern in ganz anderen Professionen tätig, sodass die erfolgreiche Umsetzung nie existenziell wichtig war. Es war auch klar, dass wir nie selbst in die seriennahe Umsetzung einsteigen würden. Ziel war bloß, die Erfindung »zu verkaufen« ohne besondere Gewinnabsicht, um letztendlich mit etwas Stolz solche Räder auf der Straße oder in den Bergen anzutreffen.
Das Patentamt Wien verlangte für den eingereichten Patentantrag weitere Stellungnahmen. Diese erfolgten unsererseits nicht, mit der Wirkung, dass die Patentsache entschlief. Gründe dafür waren das Desinteresse der Fahrradbranche, die Idee aufzugreifen und zweitens – das soll nicht unter den Tisch fallen – weil eine ähnliche Idee schon veröffentlicht war, wie uns erst spät bekannt wurde.
Die Einfall, zusätzlich eine Gangschaltung im Kurbelgehäuse mit unterzubringen, ist aufgrund des Konstruktionsprinzips naheliegend, sind doch ähnlich wie bei Pinion-Getrieben grundsätzlich ebenfalls zwei Achsen im Einsatz. Es scheint möglich, zumindest acht Gänge zusätzlich zum Unrundgetriebe bereitzustellen. Im Unterschied zur starren Pinion-Tretachse ist hier die Tretachse aber in der Mitte geteilt: Eine logische Folge davon, dass die Tretkurbeln die meiste Zeit von der 180°-Stellung zueinander während der Kurbeldrehung abweichen und sich die relative Stellung zueinander stetig ändert. Durch einfache Änderungen im Getriebe kann das Verhalten mehr oder weniger deutlich vom klassischen »runden« Tretverhalten abweichend gestaltet werden.
Erläuterung zur Getriebefunktion
Sie sehen im folgenden Diagramm und in den Bildern 4 bis 5, dass relativ zum hier normiert dargestellten Drehwinkel des Kettenblattes (Normierung bedeutet hier, dass das Kettenblatt hypothetisch so übersetzt wäre, dass es so schnell dreht wie die Pedale im Durchschnitt) das eine Pedal während der oberen Tretphase vorläuft und das sich aufwärts bewegende Pedal nachläuft, jeweils relativ zur 180°-Stellung. Nur in der waagrechten Position stehen sich die Pedale im 180°-Winkel einander gegenüber, im Gleichklang mit dem normierten Drehwinkel des Kettenblattes.

Soweit zur Aufhebung der Totpunkt-Opposition. Aber wie verhält es sich mit den relativen Winkelgeschwindigkeiten? Das sich aufwärts bewegende Pedal muss dies relativ schneller tun als sich das getretene Pedal nach unten bewegt – sonst könnte das sich aufwärts bewegende Pedal nicht bereits in Vorlage sein, wenn das getretene Pedal den tiefsten Punkt erreicht hat.
Das folgende Diagramm zeigt die relativen Winkelgeschwindigkeiten der Pedale zueinander und im Verhältnis zur normierten Winkelgeschwindigkeit des Kettenblattes.
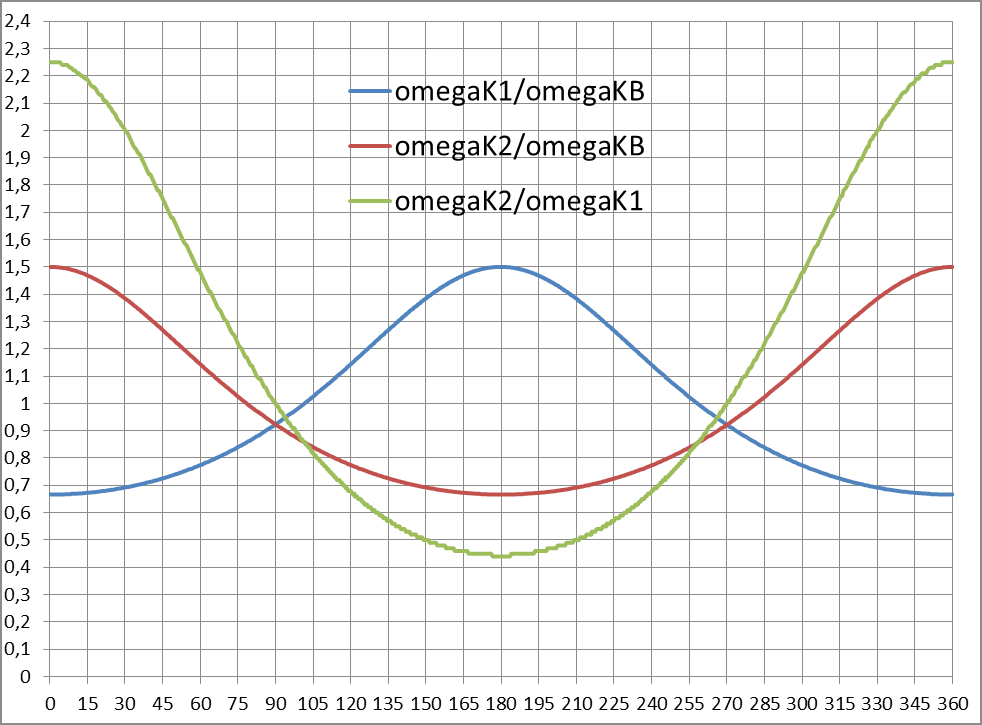
Da sich die relativen Winkelgeschwindigkeiten umgekehrt proportional zu den jeweiligen Übersetzungen verhalten, ist klar ersichtlich, welch vorteilhaft hohe Übersetzung man in der Tretphase mit dem getretenen Pedal hat. In der waagrechten Stellung (hier bei 0°) bewegt sich das Aufwärtspedal 2,25-mal schneller als das getretene Pedal, das zu diesem Zeitpunkt eine hohe Übersetzung aufweist. Die Winkelgeschwindigkeiten gleichen sich danach mehr und mehr an und erreichen bei etwa 90° die gleiche Winkelgeschwindigkeit wie beim klassischen Fahrrad, sind aber in dieser Stellung bei weitem nicht in Opposition von 180° zueinander. Die Änderung der Verhältnisse ist dabei fließend.
Die Bilder 4 und 5 zeigen zwei charakteristische Pedalstellungen zueinander.


Beim Prototyp ist eine Besonderheit festzustellen: Da die Umsetzung des Prinzips der Totpunktvermeidung mittels eines Unrundgetriebes sowieso eine Übersetzung zwischen zwei Achsen nötig macht, kann man das Kettenblatt relativ zu den Kurbeln schneller drehen lassen – und zwar in fast beliebigem Ausmaß. Das bedeutet, dass man mit viel kleineren Kettenblättern als üblich arbeiten kann.
Vor- und Nachteile
Unbestreitbare Nachteile sind:
- Höheres Gewicht
- Getrennte Lagerung von linker und rechter Kurbel im gleichen Gehäuse.
- »Umschulung« in ein anderes Tretmuster nach klassischem Verständnis des »runden Tritts«.
- Höhere Kosten
- Sonderkonstruktion des Rahmens (anstelle des normalen Tretlagergehäuses)
Unbestreitbare Vorteile sind:
- Kleinere(s) Kettenblatt/Kettenblätter möglich.
- Totpunktüberwindung ist sichergestellt.
- Gangschaltung im Kurbelgehäuse ist geschützt und perfekt Ölbad-geschmiert.
Vorteile könnten sein:
- Effektivere Umsetzung der Beinkraft/Energie auf die Straße, speziell bei etwas unrhythmischer Fahrweise wie z.B. beim Mountainbiken bzw. beim Aus-dem-Sattel-Gehen.
- Einbau einer Gangschaltung in das sowieso notwendige Kurbelgehäuse.
- Spezielle Vorteile in Kombination mit Kardantrieb, sofern dieses Antriebsprinzip überhaupt als vorteilhaft erachtet wird.
- Gedankliche Aufweichung des enorm emotional besetzten Begriffs des »runden Tritts«. Alle verteidigen den »runden Tritt« im herkömmlichen Sinn, aber keiner kann ihn definieren. Hinsichtlich des »runden« Tritts ist in keiner Weise bewiesen (und es kann auch nie bewiesen werden), dass die derzeitige durchgehende 180°-Stellung der Pedale zueinander den optimalen »runden Tritt« darstellt.
Rat an andere Erfinder
Aus der eigenen Erfahrung möchten wir empfehlen bzw. anmerken:
- Akribische eigene Recherche zu ähnlichen, bereits veröffentlichten Lösungen.
- Kritisch sein gegenüber Patentanwälten.
- Ein Scheitern muss möglich sein dürfen; sich nicht verbohren.
- Es kann in jedem Fall eine interessante Erfahrung im Leben sein.
Abschließend sei festgestellt, dass wir uns trotz des bisherigen Ausbleiben des Erfolges bei der Umsetzung diesbezüglich ein entspanntes Verhältnis dazu beibehalten haben. Die Kosten hielten sich mit einigen tausend Euro in Grenzen.
Beim Radfahren und auf dem Rollentrainer mit dem Prototyp hatten wir und mehrere Probanden den Eindruck, dass speziell die »Vorlage« des zu tretenden Pedals - bei tiefster Stellung des anderen Pedals – sehr angenehm ist. Wir hatten auch nicht den Eindruck, dass das veränderte Bewegungsmuster eine große Umstellung bedeuten würde. Richtige »Kraftproben« konnten wir dem Prototyp aus den oben genannten Gründen aber leider nicht zumuten.
Es würde uns freuen, wenn jemand die Idee aufgreift. Wir würden unsere Erfahrungen und das erworbene Wissen ohne Einschränkung und ohne finanzielles Interesse unsererseits engagierten Weiterentwicklern der Idee weitergeben.
Zu den Autoren
 Max
Rainer, Rum bei Innsbruck, geb. 1955. Geschäftsführer einer Chemiefirma.
Doktorat Chemie, Magister der Betriebswirtschaft, Ingenieurabschluss
Elektrotechnik, gelegentlicher Mountainbiker.
Max
Rainer, Rum bei Innsbruck, geb. 1955. Geschäftsführer einer Chemiefirma.
Doktorat Chemie, Magister der Betriebswirtschaft, Ingenieurabschluss
Elektrotechnik, gelegentlicher Mountainbiker.
Anton Rainer, Wien, geb. 1946. Steuerexperte und Ministerialrat im BM für Finanzen, Wien. Doktorat Handelswissenschaften, Dipl. Kaufmann, verwendet sein City-Bike in Wien häufig, aber ohne sportliche Ambitionen.