Ausgabe 1 · April 2006
Diesen Artikel als PDF
Aufbau und Wirkungsweise von Fahrradlichtmaschinen
von Wilfried Schmidt
Nach zwei Jahrzehnten, in denen Dynamoentwickler eine große Vielzahl von Antriebskonzepten erdacht und realisiert haben, werden eigentlich nur noch zwei Bauarten in nennenswerter Stückzahl produziert: der althergebrachte Seitendynamo, über Reibrad seitlich am Reifen angetrieben, und getriebelose, mechanisch nicht abschaltbare Vorderrad-Nabendynamos.
Von wenigen Ausnahmen bei Seitendynamos abgesehen, arbeiten alle mit Klauenpolgeneratoren (mit »Generator« ist hier immer der elektrotechnische Teil gemeint, während unter »Lichtmaschine« oder »Dynamo« das ganze Gerät, incl. Antrieb und Gehäuse verstanden werden soll).
Über Aufbau und Wirkungsweise dieser Generatoren ist selbst Fachleuten, die sich mit Fahrradelektrik befassen, oft wenig bekannt. Der vorliegende Artikel soll hier Abhilfe schaffen und helfen, die teilweise recht merkwürdigen Eigenschaften von Fahrradlichtmaschinen zu verstehen, zu beurteilen und nutzbar zu machen.
Anforderungen
Zweck einer Fahrradlichtmaschine ist es, elektrische Leistung zum Betrieb eines Scheinwerfers und (meist auch) eines Rücklichts zur Verfügung zu stellen. Idealerweise sollte dies unabhängig von der Fahrgeschwindigkeit geschehen. In Deutschland ist man z. Zt. durch § 67 StVZO auf 6 Volt Nennspannung und durch die Prüfbestimmungen für Fahrradlichtmaschinen (TA 24) auf 3 Watt Nennleistung festgelegt. Eine solche Festlegung ermöglicht die fast beliebige Zusammenstellung der Komponenten (Dynamo, Scheinwerfer, Schlussleuchte); die 3 Watt stellen einen guten Kompromiss zwischen erzielbarer Helligkeit und benötigtem Kraftaufwand dar. Lichtanlagen nach einer alternativ zulässigen Norm mit 12 Volt Nennspannung und 6,2 Watt Nennleistung (bisher sind nur ein Speichendynamo und ein Seitendynamo nach dieser Norm in Serie gegangen) sind trotz anfänglicher Begeisterung kaum zu finden.
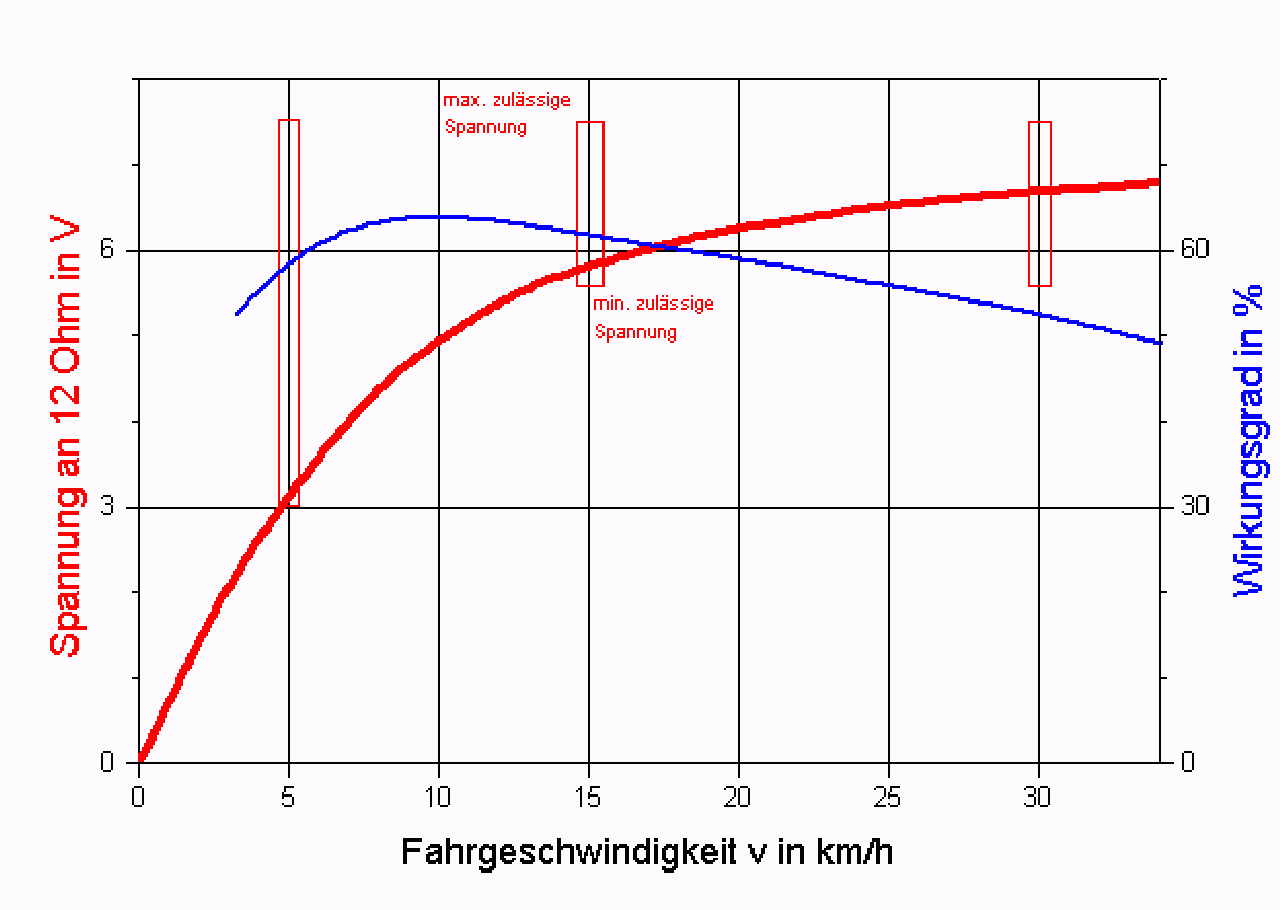
Da ein Generator unbewegt gar keine und bei geringer Drehzahl nur wenig Spannung erzeugt, muss auf die Forderung nach geschwindigkeitsunabhängiger Leistungsabgabe verzichtet und stattdessen eine mit zunehmender Geschwindigkeit möglichst schnell bis zum Nennwert ansteigende Spannung/Leistung gefordert werden. Entsprechend steht in der TA 24: Mindestens 3 V bei 5 km/h, mindestens 5,7 V bei 15 km/h und maximal 7,5 V für Geschwindigkeiten bis 30 km/h (s. Bild 3).
Diese »Meilensteine« für Dynamokonstrukteure werden von den meisten Typen relativ knapp eingehalten, was meines Erachtens auch sinnvoll ist (s. Abschnitt »Leistungsaufnahme«). Damit steht die Leistungsabgabe in engen Grenzen fest.
Als Optimierungsziele der Generatorkonstruktion verbleiben: Geringes Gewicht und geringe Herstellkosten (Gewicht und Kosten sind gekoppelt, wenn es darum geht, durch eine bezüglich der Leistungsabgabe optimierte Konstruktion Material zu sparen), guter Wirkungsgrad und damit Leichtgängigkeit andererseits. Lichtmaschinen, die nie oder nur selten in Betrieb sind (davon, dass dies der Regelfall ist, gehen wahrscheinlich völlig zurecht die Hersteller billiger Fahrräder aus), sollten auf Gewicht und Preis, solche, die häufig gebraucht werden, mehr auf Leichtgängigkeit hin optimiert werden.
Bei ständig mitlaufenden Nabendynamos aber ist vor allem die Leistungsaufnahme im Leerlauf relevant, da der Leerlauf normalerweise der viel häufigere Betriebszustand ist. Die Zuverlässigkeit und Lebensdauer eines Fahrraddynamos hingegen hängen kaum vom Aufbau des Generators, sondern vom Prinzip des Antriebs und der mechanischen Ausführung ab. Bei Nabendynamos ist hier natürlich auch die Funktion »Nabe« zu berücksichtigen, d. h. in der Praxis hauptsächlich die Lebensdauer der Lagerung. Und wie bei vielen Fahrradteilen ist der Korrosions- und Wasserschutz bei beiden Typen wichtig. Hier hat es der Nabendynamo mit zwei abzudichtenden Lagerspalten und horizontaler Achse prinzipiell schwerer als ein Seitendynamo.
Aufbau des Generators
Ein Generator besteht normalerweise aus einem das Magnetfeld erzeugenden Teil (Erreger) und einem relativ zu diesem bewegten »Anker«, in dessen Wicklung die Spannung erzeugt wird. In Fahrraddynamos (wie fast allen sehr kleinen elektrischen Maschinen) werden zur Erregung Permanentmagnete benutzt; eine elektrische Erregung wäre zu aufwendig. Seit leistungsfähige Magnetwerkstoffe kleine und leichte Magnetsysteme ermöglichen, werden diese immer als der sich drehende Teil (Rotor) ausgeführt. Der Anker mit der Spule kann also feststehen. Schleifkontakte gehören damit seit langem der Vergangenheit an. Es wird folglich immer Wechselstrom produziert, und zwar einphasiger. Fahrradlichtmaschinen, die Drehstrom produzieren, sind derzeit nicht auf dem Markt.
Wesentliche Unterschiede bestehen jedoch im Aufbau des Ankers: Das Blechpaket von sogenannten T-Anker-Generatoren hat tatsächlich das Aussehen eines Ankers. Diese Bauart ist von kleinen Elektromotoren und als »Prototyp« des Generators aus dem Physikunterricht bekannt. Fahrraddynamos mit T-Anker sind allerdings inzwischen sehr selten.
Grund: Der Aufbau ist relativ aufwendig, die notwendige Begrenzung der Spannung ist nur durch Elektronik zu erreichen.
Fast alle aktuellen Fahrraddynamos haben Klauenpolgeneratoren. Bei diesen ist in der Regel nur eine Spule koaxial zur Drehachse (d. h. um die Drehachse herum gewickelt) vorhanden. Umgeben ist die Spule von einem Blechkäfig, dessen schmale Finger (Klauen) den Magnetpolen des Rotors gegenüberstehen und das Magnetfeld durch die Spule leiten (Bild 1). Wird der Rotor um einen Polschritt gedreht, wechselt durch die abwechselnde Anordnung der Klauen das Magnetfeld durch die Spule die Richtung und eine Spannung wird erzeugt.
Der Vorteil des Klauenpolgenerators ist einerseits der einfache Aufbau aus wenigen, billig zu fertigenden Teilen. Die nur mit Klauen mögliche hohe Polpaarzahl ermöglicht aber auch bei kleiner Drehzahl trotz kleiner Abmessungen und geringen Gewichts eine hohe Leistung, liefert automatisch die gewünschte gekrümmte Kennlinie (siehe Berechnung) und für langsamdrehende Nabendynamos eine ausreichend hohe Frequenz der Wechselspannung.

Die relative Lage von Magnet und Spule kann verschieden sein. Bei Seitendynamos war lange Zeit ein innenliegender zylindrischer Magnetrotor üblich; die unbewegte Spule lag darum herum, fest mit dem Gehäuse verbunden (Beispiele: Union 6701, Nordlicht). Für die erzeugte Spannung ist jedoch nicht die Drahtlänge sondern nur die Anzahl der Windungen ausschlaggebend. Darum ist es günstiger, den Spulendurchmesser zu verkleinern.
Die Spule kann dann neben (wie bei vielen schlanken Seitendynamos) oder innerhalb des Magnetrotors liegen. Die optimale Anordnung Spule innen – Magnet außen wurde zuerst bei den Walzendynamos (UNION und Soubitez) realisiert, wo sie sich wegen des rotierenden Gehäuses sowieso anbietet und später auch auf herkömmliche Seitendynamos übertragen (Beispiel AXA HR). Bei getriebelosen Nabendynamos ergibt sie sich durch die feststehende Achse und die rotierende Nabenhülse von selbst.
In T-Anker wie Klauenpolgeneratoren wird das Magnetfeld innerhalb der Spule, wo es notwendigerweise permanent seine Richtung wechseln muß, durch Eisenblech geleitet. Die Ummagnetisierung von Eisen hat jedoch Hysterese- und Wirbelstromverluste zur Folge. Die Wirbelstromverluste, die in der Regel überwiegen dürften, lassen sich durch Verwendung dünner, gegeneinander isolierter Blechschichten, verlustarmen Materials und eine günstige Gestaltung zwar reduzieren, jedoch nicht ganz vermeiden.
Generatoren, die auf Eisen als magnetischen Leiter innerhalb der Spule verzichten, werden eisenlose oder Luftspulen-Systeme genannt. Schnell laufende Kleinmotoren dieser Art sind als Glocken- oder Scheibenläufer bekannt. Da Luft das Magnetfeld viel schlechter leitet als Eisen, brauchen Luftspulengeneratoren deutlich mehr oder stärkeres Magnetmaterial und ein größeres Wickelvolumen, sodass sie bei gleicher Leistung und Drehzahl viel schwerer und teuerer als z. B. Klauenpolgeneratoren werden.
Auch ist der Aufbau aufwendiger, denn ohne Eisen kann der Magnetfluss im Anker nicht umgeleitet werden, muss also geradlinig und durch einen zweiten Luftspalt wieder in den Erreger zurück. Der bestechende Vorteil der Luftspulensysteme, nämlich der absolut verlustfreie Leerlauf, würde sie für getriebelose Nabendynamos prädestinieren. Leider ist gerade hier eine Anwendung mit vernünftigem Gewicht nicht möglich. Der einzige Fahrraddynamo mit Luftspulengenerator ist zur Zeit der Seitendynamo Lightspin der Schweizer Firma Dynosys.
Elektrisches Verhalten der Klauenpolgeneratoren
Ein Klauenpolgenerator der beschriebenen Bauart liefert im Leerlauf eine linear mit der Drehzahl n ansteigende Wechselspannung mit dem Effektivwert U0 ~ n, bzw., da die Drehzahl proportional der Fahrgeschwindigkeit v ist, U0 ~ v. Bei Belastung mit einem ohmschen Verbraucher steigt die Klemmenspannung ebenfalls zuerst an; durch die das Magnetfeld schwächende Wirkung des Stroms knickt die Spannungskennlinie jedoch bald ab und geht gegen einen Grenzwert, der idealerweise etwas oberhalb der Nennspannung der Glühlampen liegen muss.
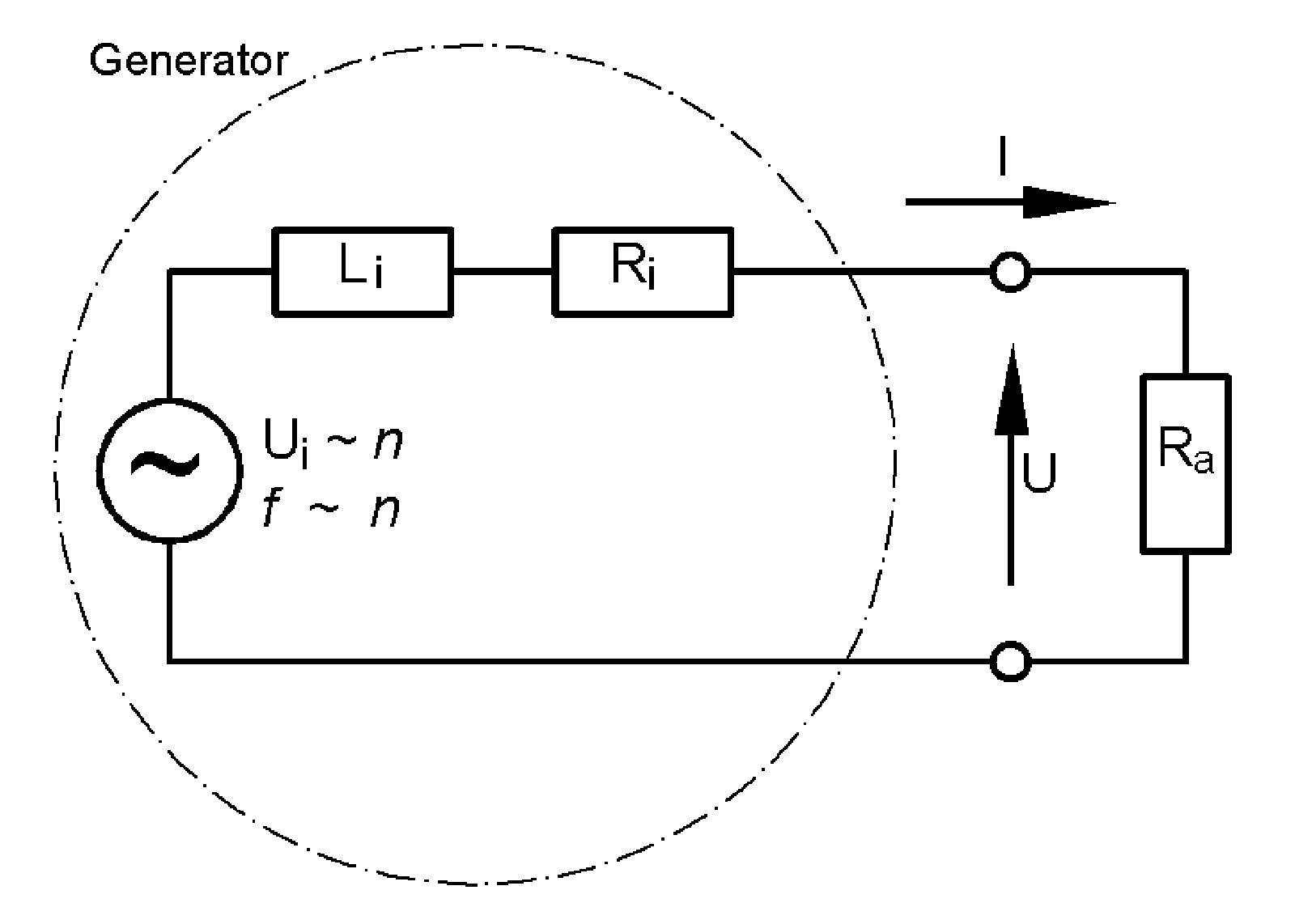
Analytisch lässt sich dies Verhalten sehr gut mit dem von Wullkopf
[Wullkopf 1959]
vorgeschlagenen Ersatzschaubild (Bild 2) erfassen. Es beschreibt den
Generator als Spannungsquelle, die eine Sinusspannung liefert, deren
Frequenz f und Effektivwert der Drehzahl proportional sind. In Reihe dazu
werden der ohmsche Innenwiderstand Ri und die innere
Induktivität Li angenommen. Der ansteigenden Quellenspannung
steht damit ein ebenfalls drehzahlproportionaler Innenwiderstand
gegenüber, der bei höherer Frequenz die ohmschen Widerstände Ri
und Ra im Stromkreis überwiegt. An der äußeren Last Ra
fällt eine Wechselspannung mit dem Effektivwert
bzw. der Effektivleistung
ab.
Ausführliche Herleitung siehe
[Schmidt 1991]. I∞ , Li und p (die Polpaarzahl) sind feste
Größen, die sich aus dem Aufbau des Generators ergeben. Mit
lässt sich schreiben
bzw.
oder auf die Fahrgeschwindigkeit v bezogen
bzw.
wobei auch v1/2 proportional zu (Ri + Ra)
ist.
Der Term ergibt die bekannte gekrümmte Form der Lastkennlinie eines
Fahrraddynamos (Bild 3), die Größe
Die Anforderungen der TA 24 werden gerade erfüllt, wenn v1/2 bei 10 km/h und l∞ bei 0,6 A liegt.
Den Verbraucher als ohmsche Last von 12 Ohm anzusehen entspricht den Prüfbestimmungen der TA 24 für die 6 Volt/3 Watt Lichtanlage und ist zum Vergleich verschiedener Generatoren sowie für die rechnerische Behandlung eine ausreichende Näherung.
Tatsächlich haben Glühlampen jedoch einen mit der Belastung zunehmenden Widerstand (der Wendelwerkstoff ist ein sogenannter Kaltleiter); die Spannungskennlinie wird dadurch deutlich verändert. Spannungsmessungen mit realen Leuchten dürfen daher mit denen an 12 Ohm Prüflast nicht verwechselt werden.
Lastveränderung
Die obenstehende Berechnung zeigt, dass ein normaler Fahrraddynamo, jedenfalls wenn nicht weitere Maßnahmen zur Spannungsbegrenzung eingebaut sind, keineswegs, wie das Typenschild vermuten lässt, eine bestimmte Spannung oder Leistung erzeugt, sondern eher durch seine Stromabgabe charakterisiert wird. Ein vergrößerter Lastwiderstand z. B. treibt Spannung und Leistung in die Höhe; allerdings steigt die Geschwindigkeit, bei der ein gewisser Prozentsatz der Endleistung erreicht wird, ebenfalls an. So hat beispielsweise der Ausfall eines Scheinwerfers zur Folge, dass an Rücklicht mit 60 Ohm Nennwiderstand weit mehr als 6 Volt Spannung und sogar mehr als die gesamten 3 W Leitung erzeugt werden können, was einem 0,6-W-Birnchen nicht lange gut tun kann. Aber auch die Elektroniken von Diodenrücklichtern sind durch eine solche Spannungserhöhung gefährdet.
Der Effekt lässt sich auch nutzen, um mehr Licht zu erzeugen. Man kann z. B. zu den normalen Verbrauchern (Scheinwerfer plus Rücklicht) einen zweiten Scheinwerfer mit 3-Watt-Glühbirne in Reihe schalten und hat dann bei höherer Fahrgeschwindigkeit (etwa ab 30 km/h) die doppelte Lichtmenge. Bei kleinen Fahrgeschwindigkeiten ist allerdings die Spannung für beide Scheinwerfer zu klein, sodass weniger Licht produziert wird. Dann muss der Zusatzscheinwerfer mit einem »Kurzschlussschalter« überbrückt werden. Auch die Leuchten des 12-Volt-Systems lassen sich so an einem 6-Volt-Dynamo betreiben, allerdings hat man damit nicht die Rückschaltmöglichkeit auf 6 Volt/3 Watt.
Ein solches Tuning, das nur mit verlustarmen und durchrutschsicheren Nabendynamos befriedigend funktioniert, empfiehlt sich also nur für Schnellfahrer oder mit einem in ein kleines Laufrad eingebauten, aber für große Raddurchmesser ausgelegten Nabendynamo.
Eine andere Methode der Laständerung ist die Reihenschaltung einer Kapazität (Kondensators), wie sie von Kusmierz [Kusmierz 1985] vorgeschlagen wurde. Richtig dimensioniert kompensiert der kapazitive Widerstand im mittleren Geschwindigkeitsbereich den induktiven Innenwiderstand des Generators und lässt damit einen höheren Strom fließen. Die Wirkung wird bei höherer Geschwindigkeit (Frequenz) geringer, sodass sich ab etwa 15 km/h eine fast konstante Spannung erzielen lässt. Bei ganz kleinen Geschwindigkeiten lässt der Kondensator allerdings weniger Strom durch. Es werden relativ hohe Kapazitätswerte in der Größenordnung 100 bis 1000 µF benötigt, die als Elektolytkondensatoren mit gerade noch vernünftigen Abmessungen zur Verfügung stehen.
Im Zusatzscheinwerfer E6-Z von Schmidt Maschinenbau senkt ein in Reihe geschalteter bipolarer Elektrolytkondensator (330 µF) die Geschwindigkeit, ab der sich das Zuschalten lohnt, auf unter 20 km/h.
Verluste
Das zur Berechnung der Spannungskennlinie verwendete Ersatzschaubild (Bild 2) zeigt, dass am ohmschen Innenwiderstand Ri eine Verlustleistung auftritt, die zur Nutzleistung im Verhältnis Ri /Ra steht, d. h. den Wirkungsgrad auf Ra /( Ri + Ra) begrenzt.
Ebenso ist ersichtlich, dass die Begrenzung des Stromes (und damit der Spannung) nicht wie oft angenommen durch »Verbraten« überschüssiger Energie erfolgt, sondern durch die verlustlos funktionierende stromdrosselnde Wirkung der inneren Induktivität.
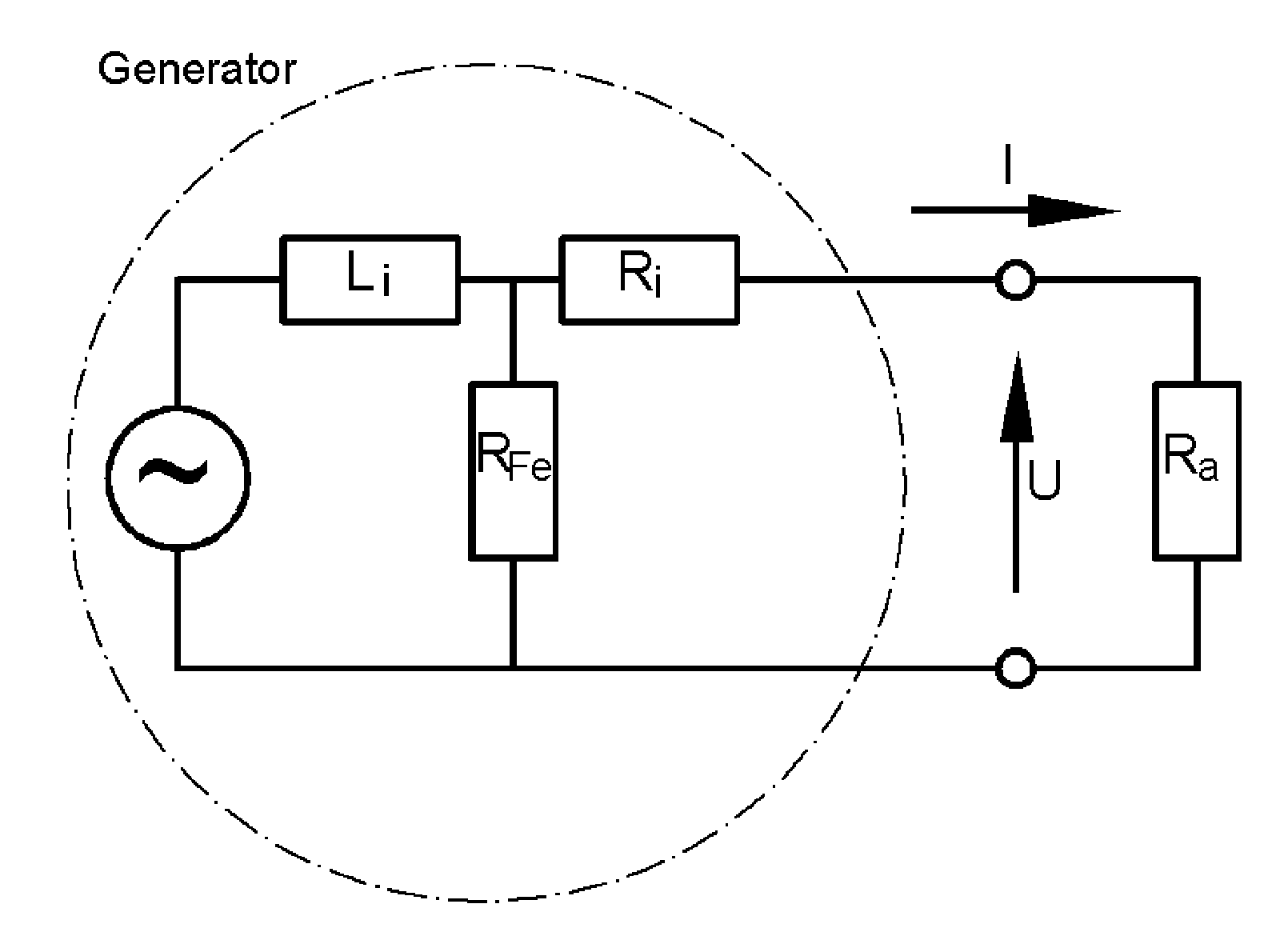
Die bereits angesprochenen Ummagnetisierungsverluste sind in diesem Modell nicht berücksichtigt. Müller-Skrypski [Müller-Skrypski 1987] schlägt hierfür die Einführung eines ohmschen Ersatzwiderstandes vor, der die Effekte der im Eisen auftretenden Wirbelströme gut erfasst (Bild 4).
Die Form der Spannungskennlinie unter Nennlast ändert sich durch diesen inneren Verbraucher nicht. Im Leerlauf verhält sich ein so charakterisierter Generator jedoch wie der vorher betrachtete unter Last. Die Spannungskennlinie weicht von dem linearen Verlauf ab, und zwar um so stärker bzw. früher, je größer diese Verlustquelle ist. An der Spannungskurve im Leerlauf lassen sich also sehr gut die Wirbelstromverluste ablesen.
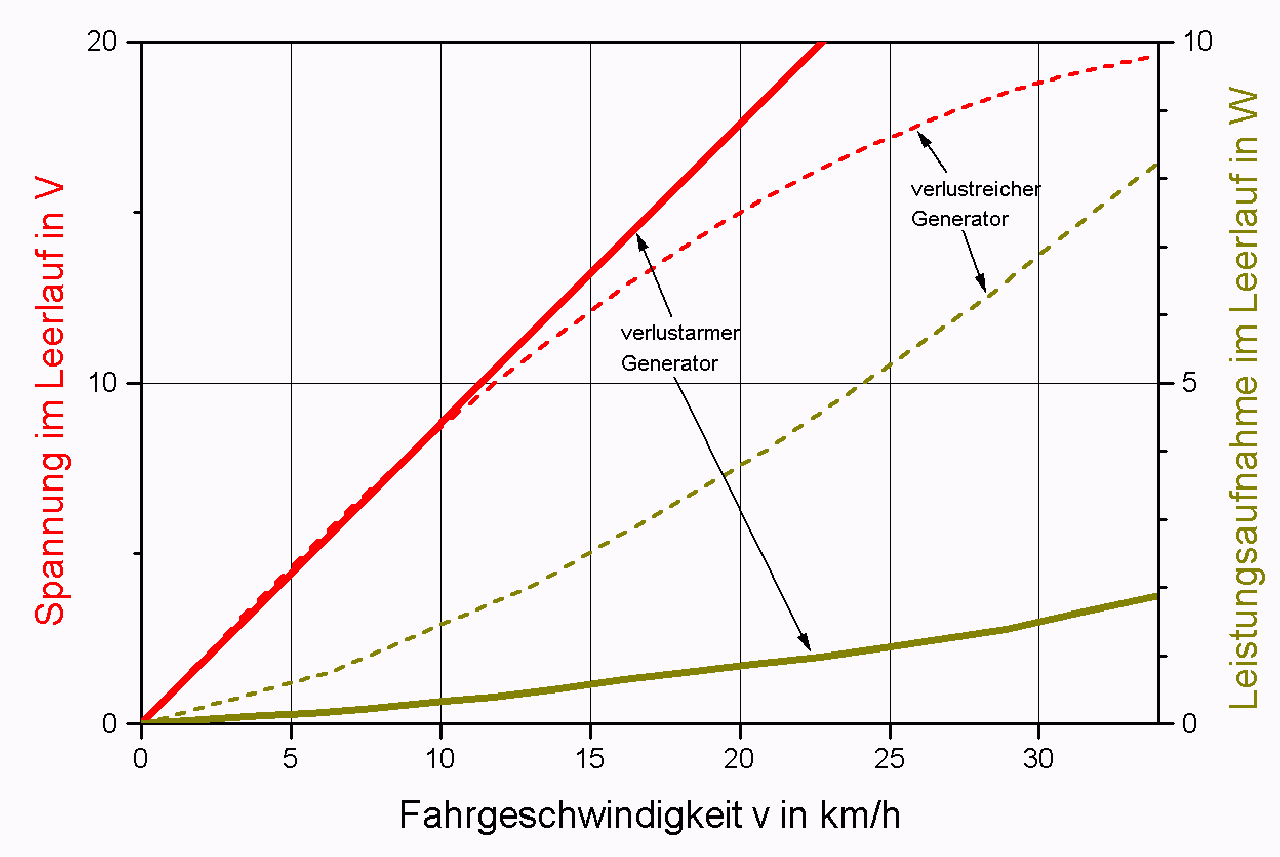
Bei ständig mitlaufenden Nabendynamos ist die Leistungsaufnahme im Leerlauf von Bedeutung. Sie steigt nach diesem Modell zunächst quadratisch mit der Geschwindigkeit an und übersteigt ab einer gewissen Geschwindigkeit die Leistungsaufnahme unter Last. Bei verlustreichen Generatoren kann dies schon im relevanten Geschwindigkeitsbereich (unter 30 km/h) liegen (Bild 5). Bei solchen könnte man durch Kurzschließen des Stromkreises (statt des üblichen Unterbrechens) die Leerlaufverluste verringern.
Eine typische Wirkungsgrad-Kennlinie für konstante ohmsche Last zeigt Bild 3. Der maximale Gesamtwirkungsgrad (bei einfachen Seitendynamos im Bereich zwischen 30 % und 40 %, bei getriebelosen Nabendynamos bis zu 70 %) wird bei sehr niedriger Geschwindigkeit, etwa v1/2, erreicht. Da einige Verlustquellen (etwa Wirbelstromverluste in den Klauen und mechanische Reibungsverluste) mit der Geschwindigkeit stark ansteigen, während die Leistungsabgabe dies ja kaum noch tut, sinkt der Wirkungsgrad darüber hinaus erheblich ab. Ein an sich wünschenswerter steiler Spannungsanstieg wird also durch einen schlechteren Wirkungsgrad im Bereich üblicher Fahrgeschwindigkeiten erkauft
Die Abhängigkeit des Wirkungsgrades und der Leistungsaufnahme im Leerlauf von der Geschwindigkeit lässt es sinnvoll erscheinen, Nabendynamos, deren Drehzahlen vom Raddurchmesser abhängen, für unterschiedliche Laufradgrößen mit entsprechend dimensionierten Generatoren auszustatten.
Der SON ist beispielweise schon seit langem in einer Version für 16″ bis 20″ erhältlich; die neuen SON XS und XS100 sind speziell für kleine Laufräder gestaltet. Durch deren höhere Drehzahlen konnte das Generatorgewicht deutlich reduziert werden, besonders erfreulich für die Anwendung in Falträdern. Natürlich können auch Rennradfahrer, denen die Leistungsabgabe bei kleinen Geschwindigkeiten weniger wichtig ist, solche für höhere Drehzahlen ausgelegte Nabendynamos nutzen.
Polfühligkeit
Dreht man einen Fahrraddynamo von Hand, lassen sich die einzelnen Pole deutlich fühlen. Bedingt ist dieses ungleichförmige Drehmoment durch die Anziehungskräfte zwischen Magnetpolen und Klauen, die den Rotor in ganz bestimmte Vorzugsstellungen (eine oder zwei pro Polschritt) ziehen. Um den Rotor aus solch einer Vorzugstellung wegzudrehen, wird Energie benötigt; schnappt er dann in die nächste weiter, wird ein Großteil dieser Energie wieder frei. Der Leistungsbedarf des Generators hat also nichts mit dem zum schrittweise Drehen benötigten Drehmoment zu tun.
Die Stärke dieser Polfühligkeit hängt von der Feinabstimmung von Magnetfeld und Eisenkörper ab und kann von Exemplar zu Exemplar stark schwanken, ohne die elektrischen Eigenschaften wesentlich zu beeinflussen. Eine zu große Polfühligkeit kann allerdings bei bestimmten Fahrgeschwindigkeiten (Resonanzfrequenzen) zu spürbaren Vibrationen führen.
Viel besser als durch Drehen der Achse von Hand lässt sich die (Leerlauf-)Leistungsaufnahme eines Nabendynamos abschätzen, indem man ein komplettes Laufrad mit fest eingespannter Achse realistisch schnell dreht und die Abbremsung beobachtet.
Ausblick
Während die Festlegungen für die Zulassung von Fahrraddynamos sich noch an den Erfordernissen einfacher Glühlampen-Scheinwerfer und Rücklichter orientieren, wird die Vielfalt der angebotenen (und zugelassenen) Leuchten ständig größer. Zu den kondensatorgespeisten Standlichtanlagen und den mit den Nabendynamos aufgekommenen Sensorelektroniken (die das Licht bei Nacht automatisch einschalten) kommen jetzt reine Diodenscheinwerfer, die sich weit von den Eigenschaften eines 12-Ω-Ersatzwiderstandes entfernen.
So lässt sich selbst mit immer wieder nachgebesserten Richtlinien (die durch die Trägheit der Verfahren dem Fortschritt der Technik sowieso hinterherhinken) kaum mehr eine sinnvolle Entwicklung und die bisher angestrebte Kompatibilität der Komponenten gewährleisten. Wahrscheinlich wird es bald notwendig, die komplette Fahrradlichtanlage als System aufzufassen, entsprechend zu prüfen und zuzulassen.
Da gerade bei den Nabendynamos sich der Klauenpolgenerator in allen Qualitätsklassen etabliert hat, lohnt es sich, dessen Eigenschaften bei der Entwicklung solcher Systeme zu berücksichtigen. So könnte zum Beispiel ein gewichts- und verlustoptimierter Generator mit (im Vergleich zu der derzeit geforderten Dimensionierung) reduzierter Leistung permanent Energie in einen Akku liefern, der bei Nacht die Leuchten bedarfsgerecht (d. h. manchmal vielleicht nur mit 1 Watt, in Extremfällen aber auch mit deutlich mehr als 3 Watt) elektrischer Energie versorgt und darüber hinaus bei Tag für andere elektrische Anwendungen zur Verfügung steht.
Zum Autor
 Wilfried
Schmidt ist Inhaber von Schmidt Maschinenbau. Sein Tübinger Unternehmen
widmet sich seit über 10 Jahren der Herstellung von Nabendynamos (SON)
in vielen Varianten. Seit einiger Zeit ist auch ein Scheinwerfer (E6) im
Programm. Wilfried Schmidt ist Alltags- und Reiseradler, er lebt seit
jeher ohne eigenes Auto.
Wilfried
Schmidt ist Inhaber von Schmidt Maschinenbau. Sein Tübinger Unternehmen
widmet sich seit über 10 Jahren der Herstellung von Nabendynamos (SON)
in vielen Varianten. Seit einiger Zeit ist auch ein Scheinwerfer (E6) im
Programm. Wilfried Schmidt ist Alltags- und Reiseradler, er lebt seit
jeher ohne eigenes Auto.
Sein Text ist die aktualisierte Fassung eines Aufsatzes aus Pro Velo 47
(4/96).
Literatur
- Kusmierz 1985
- R. H. Kusmierz: Grundlagen der Funktion von Fahrradlichtmaschinen. In: Pro Velo, Bd. 4, 1985
- Müller-Skrypski 1987
- T. Müller-Skrypski: Untersuchungen an Fahrraddynamos. In: Pro Velo, Bd. 8, 1987
- Schmidt 1991
- W. Schmidt: Konstruktion eines Nabendynamos mit Getriebe. Diplomarbeit an der Uni Stuttgart IMA, 1991
- Wullkopf 1959
- H. Wullkopf: Kleinstgeneratoren mit permanentmagnetischem Läufer. In: Elektrotechnischen Zeitschrift, Bd. 80, 1959