Ausgabe 16 · September 2013
Diesen Artikel als PDF
Wirkungsgrad-Messungen an Nabenschaltungen
von Andreas Oehler
Während Messungen an Nabendynamos und Scheinwerfern nahezu jährlich veröffentlicht werden, wurde der letzte größere Prüfstand-Test an Nabenschaltungen im Jahre 2001 veröffentlicht. Damals war die Rohloff Speedhub recht neu auf dem Markt und ihr Wirkungsgrad wurde intensiv diskutiert. Dann passierte einige Jahre nichts grundlegend Spannendes am Nabenschaltungs-Markt. Mittlerweile gibt es aber mit der Shimano Alfine11 ein Produkt, was dank Ölbad und recht großem Übersetzungsbereich eine Konkurrenz zur Speedhub darstellen könnte. Allerdings wird der Wirkungsgrad der Alfine 11 infolge der verwendeten Schrägverzahnung des Getriebes aber als vermutlich schlechter eingeschätzt. Nuvinci mit ihren stufenlosen Getrieben und Pinion mit dem 18-Gang-Stirnradgetriebe im Tretlagerbereich sind ebenso schwierig in ihrer Effizienz einzuschätzen. Es wäre deshalb reizvoll, mit schmalem Budget an Zeit und Geld einen Prüfstand zu realisieren, um vergleichende Wirkungsgrad-Messungen an Fahrradantrieben zu ermöglichen.
Hier soll nun ein neu aufgebauter Prüfstand vorgestellt werden samt ersten Messungen, Fehlerbetrachtung und Verbesserungsmöglichkeiten. Detaillierte Messergebnisse zu unterschiedlichsten Antriebslösungen sollen in den nächsten Ausgaben der Fahrradzukunft folgen.
Überlegungen zum Prüfstanddesign
Rahmenbedingung für den Bau war ein Budget von 500 €. Der Antrieb sollte 50 bis 300 Watt am Tretlager liefern und im Bereich 60 bis 120 U/min regelbar sein.
Beliebige, gängige Naben bzw. Hinterräder sollten verbaut werden können. Die Bremse muss feinfühlig, leise, gleichmäßig, dauerstandfest und leicht regelbar mit 0 bis 300 Watt über einen großen Drehzahlbereich verzögern. Drehmomente an An- und Abtrieb sollten auf besser als 2% ablesbar sein, auch bei schwankendem Drehmoment. Der ganze Prüfstand darf nur so groß und schwer sein, dass er mit einem gängigen Fahrrad-Anhänger noch transportierbar ist.
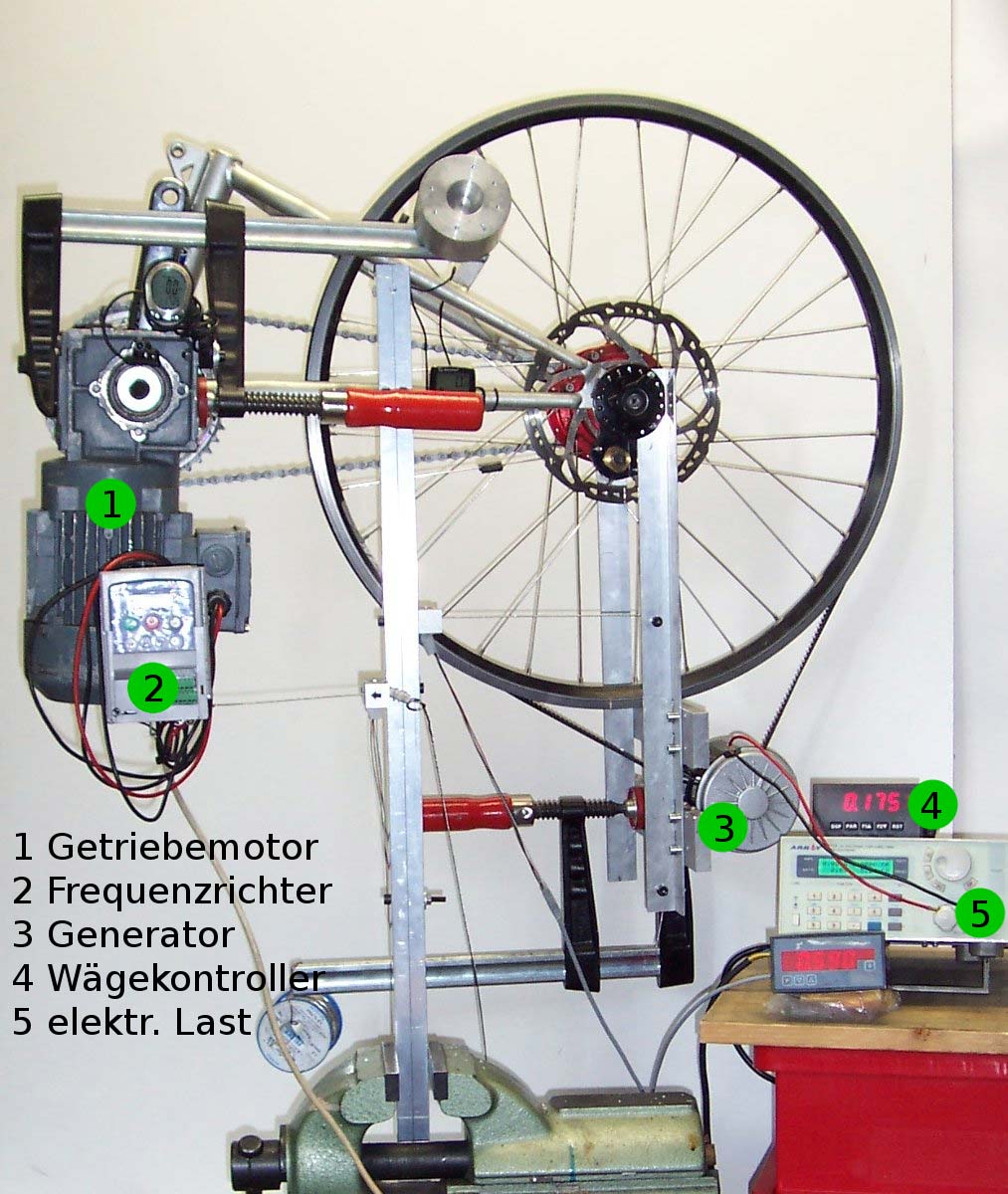
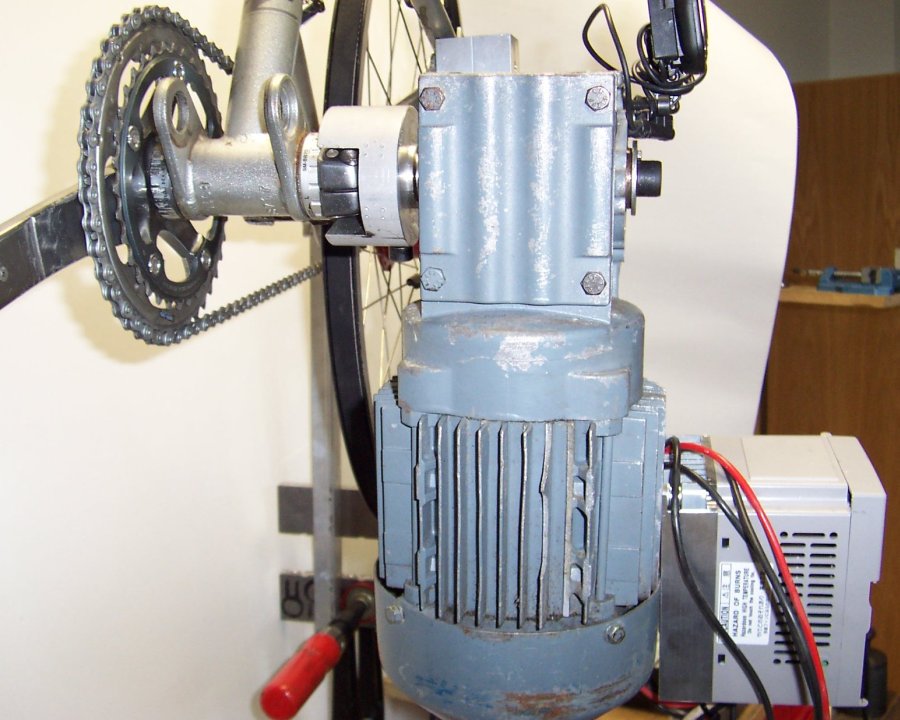
Grundidee war der Antrieb am Tretlager mit Hilfe eines Drehstrom-Winkelgetriebemotors, der direkt mit der Tretlagerwelle verbunden ist. Solche Motoren sind als Antrieb von Rolltoren oder Kettenantrieben in der Industrie weit verbreitet und gebraucht sehr preisgünstig. Ein solcher Motor mit 500 Watt Nennleistung und 60 U/min Nenndrehzahl passt sehr gut zu den obigen Anforderungen. Mit einem geeigneten Frequenzumrichter lässt sich die Drehzahl im Bereich 30–180 U/min variieren bzw. nachregeln und alles problemlos an einer normalen 230V-Steckdose betreiben.
Schwieriger war die Auswahl eines geeigneten Prinzips für die Bremse. Da in erster Linie nur ausgeliehene Naben vermessen werden sollen, darf die Nabe nicht beschädigt und auch kein aufwändiger Adapterbau notwendig werden. Mechanische Felgen- oder Scheibenbremsen verschleißen bei Dauerbremsung mit über 200 Watt recht schnell, sind kaum aufs Watt genau justierbar und driften bei Erwämung stark in ihrer Wirkung. Denkbar wäre eine Bandbremse mittels Lederband, die im Felgenbett läuft. Allerdings sind Felgen gelegentlich innen recht gratig und könnten das Bremsband beschädigen. Zudem ist fraglich, ob bei glatten, eloxierten Felgen die gewünschte Bremsleistung erzielt werden kann und ausreichend konstante Werte erreichbar sind. Letztendlich habe ich einen als Gleichspannungs-Generator betriebenen 300 Watt Motor aus einem Elektro-Roller verwendet. Dieser liefert seinen Strom an eine regelbare elektronischen Last, die per Tastatur oder Drehknopf eine einstellbare elektrische Leistung aufnimmt. Der Generator wird mittels eines Zahnriemen angetrieben, der auf der Fahrrad-Felge läuft. Der Generator sitzt auf einer robusten Schwinge, die drehbar auf der Nabenachse gelagert ist. Achsmuttern bzw. Schnellspanner für die Nutzung eines Einspur-Anhängers erlauben, die Schwingenlager an (nahezu) beliebige Nabenachsen zu montieren.
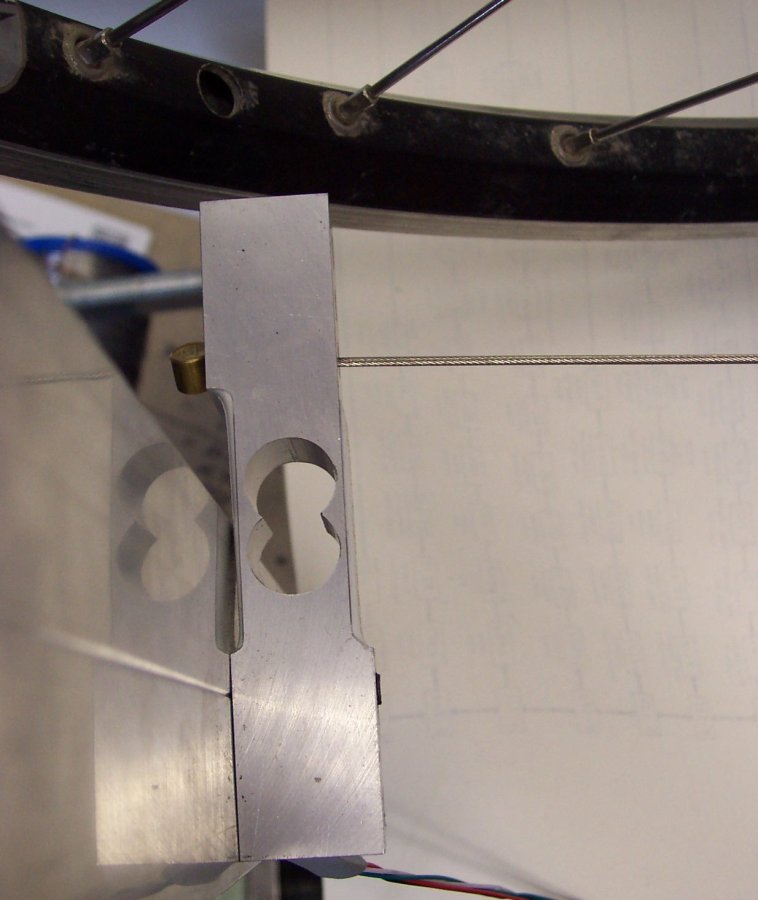
Zur Drehmoment-Messung war zunächst daran gedacht, sehr preisgünstig erhältliche digitale Koffer-/Angler-/Hängewaagen zu verwenden. Allerdings stellte sich heraus, dass diese stets mit verschiedenen Automatiken versehen sind, die einen einmal gemessenen Maximalwert fix anzeigen oder sich gar nach einer Minute ausschalten. Eine Mittelwertbildung bei leicht schwankendem Messwert ist bei diesen Geräten nicht vorgesehen. Die Wahl fiel deshalb auf robuste Wägezellen mit Dehnungsmessstreifen-Brücke und 15 kg Maximallast. Dazu Wägekontroller mit DMS-Eingang, Digitalanzeige und digitalem Filter. Dank ebay-Gebrauchtkauf liegt auch solch professionelle Messtechnik noch im Preisrahmen. Nachteil der Profi-Technik ist die Notwendigkeit der Verkabelung, Programmierung und Vorversuche mit Kalibrier-Gewichten.
Die Komponenten wurden nun an die Schwinge eines ausgemusterten Baumarkt-Fully montiert, Ein daran geschraubtes Aluminium-Rechteckrohr ermöglicht das Einspannen des Prüfstand in einen Schraubstock und die Befestigung der Wägezellen.


Leistungs-Messung
Die Antriebs- oder Bremsleistung berechnet sich als:
Mit F als mittels Wägezelle gemessener Kraft, l dem wirksamem Hebelarm zwischen Schwingendrehpunkt und Wägezelle sowie n der Drehzahl. Letztere ermittelt man sowohl am Tretlager wie auch am Laufrad simpel mit einem Fahrrad-Tachometer, der auf Zehntel km/h genau anzeigt. Verluste im Getriebemotor wie auch im Riemen und Generator schaden nicht, weil auch diese sich an der jeweiligen Schwinge abstützen. Allein die Luftverwirbelungsverluste der Speichen und Felge müssen mittels Vergleichsmessungen der uneingespeichten Nabe und der (ohne Zahnriemen, ungebremsten) Nabe im Laufrad einmal ermittelt werden.
Gemessen habe ich im wesentlichen bei 60 U/min Kurbeldrehzahl, im Ausnahmefall auch bei 90 U/min. Vor jeder Mess-Session muss die Wägezellen-Messkraft genullt werden. Ausgleichsgewichte an Auslegern an den Schwingen helfen dabei. Gemessen habe ich i.A. bei 50, 100, 150 und 200 Watt Antriebsleistung. Dazu wird die elektrische Leistungsentnahme aus dem Generator an der elektronischen Last so eingestellt, dass die Wägezelle an der Motorschwinge den gewünschten Wert erreicht. Dabei muss iterativ die Einstellung an Frequenzumrichter und elektrischer Last nachjustiert werden, weil beide sich gegenseitig beeinflussen: Mehr entnommene Leistung lässt die Drehzahl einbrechen.
Messungen an Singlespeed, Kettenschaltung mit Schaltwerk, Speedhub, Alfine11
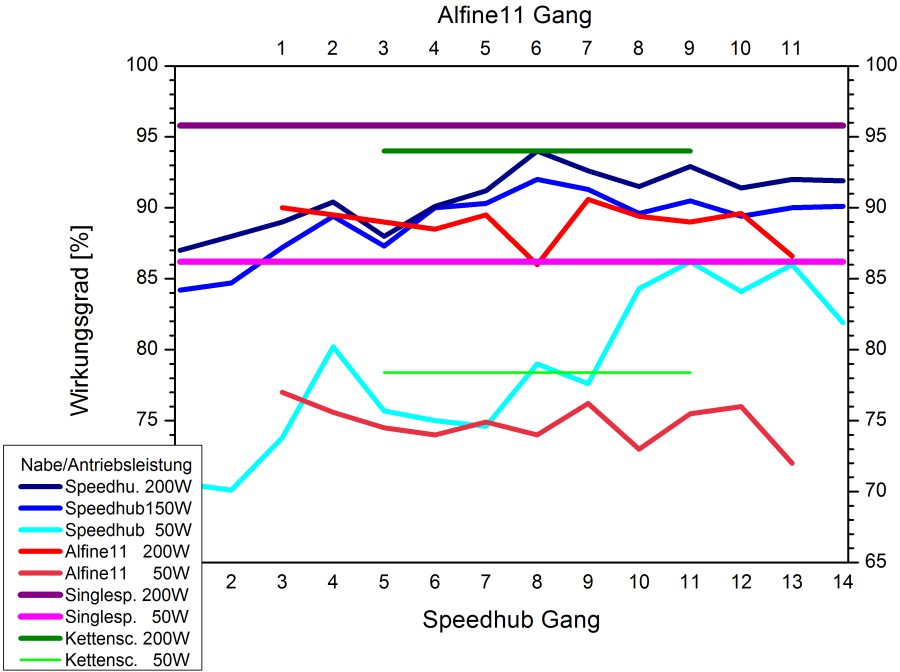
Als erster Versuch zum Test des Prüfstand wurden nur vier verschiedene Antriebssysteme verglichen. Stets kommt eine im Laborbetrieb eingefahrene Kette KMC Z9X-RB mit Original-Schmiermittel zum Einsatz. Der Singlespeed-Antrieb ohne Kettenspanner und weitere Verlustquellen liefert erwartungsgemäß den besten Wirkungsgrad. Der Wirkungsgrad steigt mit zunehmender Antriebsleistung, was sich mit leistungsunabhängigen Verlusten in der Kette, Tretlager und Nabe begründet.
Die Verluste mit montiertem Kettenspanner sind deutlich erhöht. Verwendet wurde ein gebrauchtes (ca. 10.000 km Alltags- und Reisebetrieb), leicht verschmutztes, aber wenig verschlissenes Exemplar eines Sachs Neos aus den 90er Jahren. Die Kettenrollen sind aus Kunststoff und laufen auf einfachen Gleitlagern
Die Speedhub war ein interessantes Referenzmuster, weil hierzu gute Vergleichsdaten veröffentlicht sind. Die verwendete Nabe ist ca. 5.000 km gefahren. Plausibel erscheint, dass die sieben kleinsten Gänge weniger effizient arbeiten als die höheren. Der laute siebte Gang wird allerdings erstaunlicherweise nicht als der ineffizienteste gemessen und der Direktgang elf ohne wirksame Getriebestufen wird erstaunlicherweise als weniger effizient als Gang acht ermittelt. Vergleiche mit den Messungen von Kyle/Berto und Rohloff zeigen große Ähnlichkeit. Rohloff ermittelt etwas bessere Werte (allerdings bei >300 Watt Antriebsleistung). Bei Kyle/Berto liegen die besten und die schlechtesten Werte dichter zusammen als die von mir ermittelten. Nicht zu erwarten war das Ergebnis, dass bei niedrigen Leistungen die Speedhub in vielen Gängen sogar effizienter arbeitet als eine Kettenschaltung mit gleicher Kette, aber leicht verschmutztem Kettenspanner.
Die Shimano Alfine 11-Gang-Nabe ist ca. 3.000 km in einem Liegerad gefahren worden und somit der obigen Speedhub vergleichbar gut eingefahren. Der Eigentümer klagte über gelegentlich unpräzises Schalten. Beim Prüfstandsbetrieb war dies aber nicht auffällig. Die von Shimano hier verwendeten schrägverzahnten Zahnräder laufen in allen Gängen geräuscharm, was aber der Theorie nach zu etwas geringerem Wirkungsgrad führen sollte. Die Messergebnisse bestätigen dies. Insbesondere aber scheint die Alfine 11-Gang- Nabe höhere lastunabhängige Verluste (möglicherweise die Dichtungen) zu haben, was sich in schlechteren Werten bei 50 Watt Antriebsleistung zeigt.
Versuche mit variierter Kettenspannung
Wer schon mal ein Nabenschaltungslaufrad ohne Kettenspanner montiert hat weiß, dass
die Wahl der optimalen Kettenspannung nicht ganz trivial ist. Zu hohe Kettenspannung fühlt sich unangenehm an und bedeutet höhere Verluste, zu geringe Kettenspannung kann Klappergeräusche oder gar eine abspringende Kette bedeuten. Bei unrund laufendem Kettenblatt kann sogar beides bei gleicher Nabenposition auftreten.
Wieviel Verluste entstehen nun durch zu hohe Kettenspannung? Wir vermaßen die Alfine 11 zum einen mit relativ loser Kette und zum anderen mit von Hand kräftig gespannter Kette (mit Handkraft in den waagerechten Ausfallenden nach hinten geschoben, während die Achsmuttern angezogen wurden). Bei 60 U/min Kurbeldrehzahl konnten unabhängig von der Antriebsleistung um fünf bis sechs Watt erhöhte Verluste ermittelt werden.
Fehleranalyse
Die hier ermittelten Wirkungsgrad-Werte sollten mit Vorsicht betrachtet werden, da es doch eine große Zahl von Fehlerquellen bzw. Grund für Abweichungen zu älteren Veröffentlichungen zum Thema gibt. Zum einen unterliegen Fahrrad-Komponenten recht großen Toleranzen. Zum anderen sind die Prüfbedingungen nie 100% dokumentiert und vergleichbar: Kettenspannung, Verschleißzustand der Komponenten, Schmierstoffe der bewegten Teile, Radialkraft auf das Nabenlager, Verluste durch angeregte Schwingungen, etc. – das alles müsste noch auf seinen Einfluss untersucht werden. Es ist anzunehmen, dass die Messungen bei niedriger Antriebsleistung kritischer sind, da hier leistungsunabhängige Fehler größeren Einfluss haben. Dazu zählen die Verluste im Tretlager, die Verluste durch die Kettenbewegung ohne Last und Ungenauigkeiten bei der Korrekturfunktion für die Luftverwirbelungsverluste von Felge und Speichen.
Abschätzen kann man den maximalen Fehler verschiedener Aspekte des Messverfahren:
| Hebelweg Drehmomentmessung | ±1 % |
|---|---|
| statische Meßwert Kraftmessung | ±0,5 % |
| Mittelwertbildung bei schwankendem Kraft-Messwert | ±3 % |
| Drehzahl Hinterrad | ±1 % (bei 30 km/h) bis ± 4 % (bei 5 km/h) |
| Drehzahl Tretlager | ±2% (bei 60 U/min) |
Da der Hebelweg nicht verändert wird, entsteht kein Fehler beim Vergleichen unterschiedlicher Antriebe auf genau diesem Prüfstand. Da sich das Drehmoment bei kleinen Drehzahländerungen kaum messbar ändert und die Übersetzung bei den hier betrachteten Antrieben jeweils bekannt ist und konstant bleibt, spielt der Ablesefehler der Drehzahl keine nennenswerte Rolle.
In der Praxis zeigte sich die Mittelwertbildung bei schwankendem Kraft-Messwert als problematischste Fehlerquelle. Ein Wägekontroller mit einstellbarer gleitender Mittelwertbildung sowie Minimierung von Unwucht aller bewegter Bauteile verspricht hier Besserung. Für zukünftige Messungen sollte an dieser Stelle weiter optimiert werden.
Fazit
Mit einem Budget von 500 € und einiger Handarbeit ist es möglich, einen Wirkungsgrad-Prüfstand für Fahrrad-Antriebe zu realisieren, dessen Ergebnisse vergleichbar mit älteren Veröffentlichungen zum Thema sind. Bei der Kraftmessung ist noch eine Optimierung gegenüber dem aktuellen Zustand angestrebt.
Die Rohloff Speedhub ohne Kettenspanner erreicht bei höherer Antriebsleistung ähnliche Effizienz wie eine Kettenschaltung mit leicht verschlissenem Schaltwerk. Shimanos Alfine11 liegt im Wirkungsgrad nur unwesentlich schlechter als die Rohloff Speedhub.
Literatur
- Kyle Chester, Frank Berto: The mechanical efficiency of bicycle derailleur and hub-gear transmissions. In: Human Power, Bd. 52, 2001
- Bernhard Rohloff, Peter Greb: Efficiency Measurements of Bicycle Transmissions a neverending Story? In: Human Power, Bd. 55, 2003
- Josef Keller: Der Wirkungsgrad im Fahrradantrieb. In: Pro Velo, Bd. 5, 1987
Zum Autor
 Andreas
Oehler (42) arbeitet als Maschinenbauingenieur beim
Fahrradbeleuchtungshersteller Schmidt Maschinenbau.
Andreas
Oehler (42) arbeitet als Maschinenbauingenieur beim
Fahrradbeleuchtungshersteller Schmidt Maschinenbau.